


Nos últimos anos, coa continua popularidade de Internet, o comercio electrónico desenvolveuse rapidamente. Os produtos de pedido dos clientes mostran as características de moitas variedades, poucos lotes e período de entrega curto, o que fai que a densidade de almacenamento dos andeis no centro de distribución loxística do provedor mellore continuamente. A frecuencia de entrada e saída de materiais do almacén é cada vez maior. O número de recollidas de pezas pequenas aumenta día a día. Cada vez son máis os centros de distribución loxística que usan o sistema de recollida de mercancías a base de coches lanzadeira para persoas.
HEGERLS (Hebei Walker Metal Products Co., Ltd.
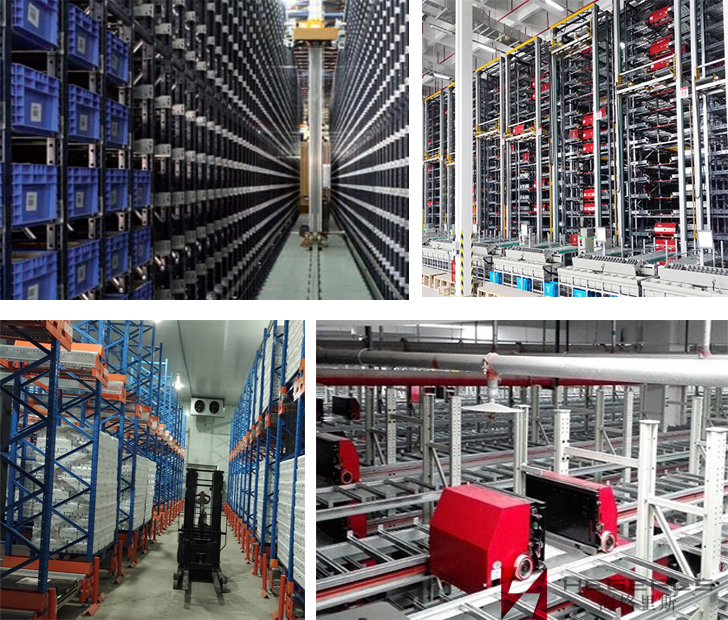
Os garfos telescópicos de suxeición utilízanse amplamente en equipos de almacenamento automático, como coches lanzadeira multicapa de almacén estéreo, colectores tipo estante AGV, RGV e minicarga. O peso máximo da caixa de material que ten HEGERLS pode alcanzar os 50 kg. O ancho de suxeición do brazo do garfo pódese axustar arbitrariamente dentro do rango de 200 ~ 600 mm. A viaxe máxima de recollida é de 840 mm. A velocidade máxima de funcionamento da horquilla telescópica é de 1,5 m/s e a aceleración é de 1,2 m/s²。 O ruído de funcionamento está controlado dentro de 75 dB, o que pode cumprir os requisitos da maioría dos racks de extensión simple e dobre. HEGERLS tamén pode personalizar o almacén estereoscópico de varias capas da caixa de garfos telescópicos de agarre segundo os requisitos específicos dos clientes, como o ancho de agarre, a carreira de picking e outros parámetros.
As pezas da caixa de garfos telescópicos de agarre Hiygris HEGERLS. Almacén de estéreo de coche de varias capas. O garfo telescópico é un mecanismo telescópico que se usa no almacén estéreo e no sistema de almacenamento automático de loxística para almacenar ou transferir material. Ten unha función de expansión automática bidireccional flexible e unha función de límite precisa. Pódese montar directamente no empilhador, ou ben montado nun mecanismo de elevación fixo, ou ben montado nunha plataforma elevadora móbil. O empilhador atravesa a calzada entre os estantes para acceder ou transferir automaticamente os elementos. Pódese conectar co sistema de liña de produción e o sistema de xestión empresarial. Usa tecnoloxía informática e de código de barras (codificador) para realizar unha xestión e funcionamento intelixentes da información.

Acerca da horquilla telescópica de sujeción HEGERLS
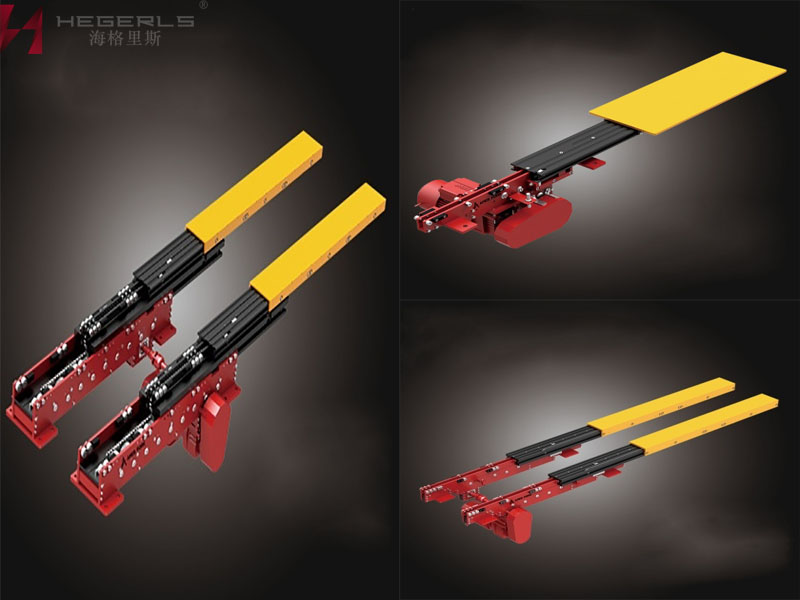
A garfo de pinza telescópica HEGERLS é un tipo único de garfo da serie de garfos telescópicos de apiladores, é dicir, un garfo de pinza telescópica automática bidireccional, tamén coñecido como garfo de pinza de suxeición ou garfo de pinza de suxeición, garfo de garfo ou garfo de garfo. . É un garfo especialmente utilizado para o traslado de pequenos colectores. Pódese montar directamente nun AGV de recollida de varios pisos ou noutras plataformas de traballo, coa expansión do brazo do garfo e o embrague da panca (gancho), completa a acción de acceso ou transferencia.
O garfo de pinza HEGERLS está feito principalmente de aliaxe de aluminio, con tamaño pequeno, peso lixeiro, velocidade de marcha rápida e expansión suave. Ao mesmo tempo, tamén adopta o principio de sincronización multimotor, entendendo que o mesmo mecanismo de garfo telescópico pode usarse para transferir ou acceder a caixas de diferentes especificacións. Non só mellora efectivamente a eficiencia do almacenamento, senón que tamén mellora moito a taxa de utilización do espazo de almacenamento, especialmente para o almacenamento intelixente intensivo de gran altura.
Clip HEGERLS sobre estrutura de garfo telescópico
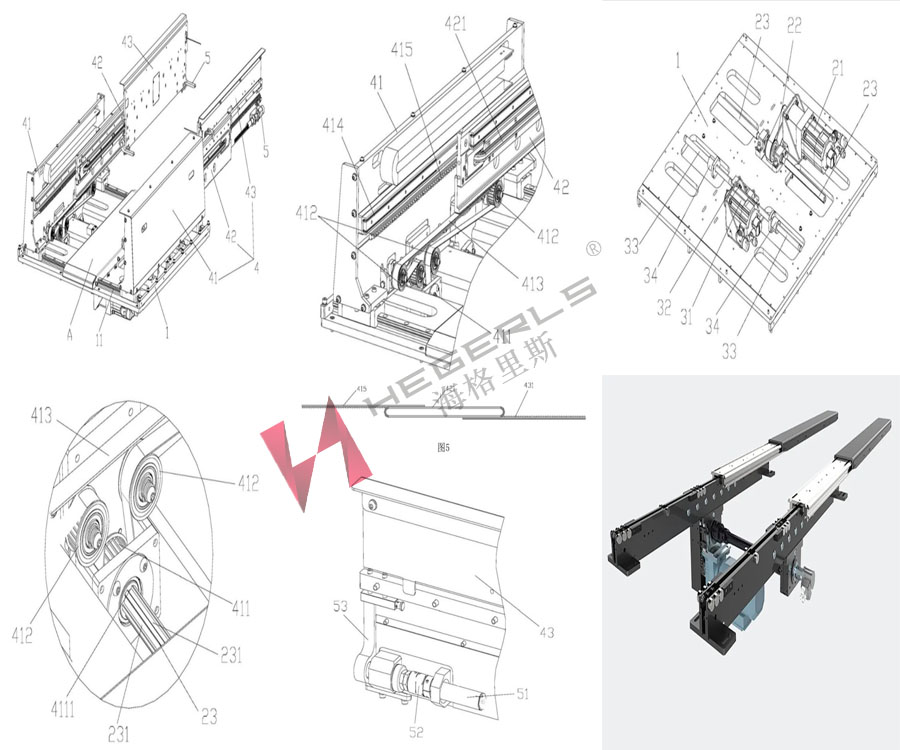
A estrutura do garfo de pinza HEGERLS pódese dividir en lugar de almacenamento profundo e lugar de almacenamento pouco profundo. Un lugar de almacenamento profundo é un lugar de almacenamento con dúas caixas de materiais, e un lugar de almacenamento pouco profundo é un lugar de almacenamento cunha caixa de material. É dicir, un lugar de almacenamento profundo pode suxeitar dúas caixas de material á vez, mentres que un lugar de almacenamento pouco profundo só pode suxeitar unha caixa de material á vez. A diferenza entre o garfo de pinza HEGERLS e o garfo telescópico dúplex ordinario é que o garfo que tira dos dedos aínda está composto por tres corpos de garfo, a saber, o corpo da garfo interior, o corpo da garfo medio e o corpo da garfo exterior, excepto que o corpo da garfo dianteiro. ten unha barra de tracción máis (gancho), que se combina co carril guía (carril deslizante), barra de rolos, roda síncrona, correa síncrona, barra fluida, varilla de cambio (gancho), eixe de elevación, barra de roda, motor de accionamento (servo) , motor de varilla de cambio O instrumento de detección e outros compoñentes forman un mecanismo telescópico completo, que coopera co brazo de garfo telescópico e o embrague da panca (gancho) para completar a acción de acceso ou transferencia.
Principio de funcionamento do clip HEGERLS sobre garfo telescópico
O brazo da garfo da garfo de pinza HEGERLS está de pé lateral e está conectado lateralmente mediante un carril de guía. A través do control, o carril guía pode desprazar cara atrás e cara atrás para axustar a distancia entre os dous brazos do garfo do garfo, para conseguir o uso común dun garfo para caixas de materiais de varias especificacións. Ao recoller materiais, o garfo esténdese ata a posición de almacenamento do material, o gancho de retención (panca) baixa e bloquea automaticamente a cara final da caixa de cartón ou de plástico e, a continuación, o garfo retrae, arrastrando o cartón ou a caixa de plástico ata o medio. o garfo, e despois móvese en sentido inverso segundo os requisitos do grao, o gancho (panca) é tirado cara atrás e o garfo retrae de novo para completar a tarefa de recoller ou transferir. Aínda que o principio do garfo de pinza é o mesmo que o do garfo telescópico ordinario, as pezas de transmisión, as bielas e outros compoñentes do garfo de dedo son moi diferentes. Utilízase para describir que a roda da cadea, cadea, engrenaxe, cremalleira, etc. son substituídas por rodas síncronas, correas síncronas, etc., mentres que o brazo deslizante usa raíles de guía e os materiais do corpo da garfo son substituídos por chapas metálicas. ou materiais de aliaxe de aluminio, polo que o peso do garfo da pinza é de só uns 80 kg.
Ademais, hai que ter en conta que durante o deseño do garfo telescópico tipo pinza, o tamaño dos estantes de almacenamento densos, a posición vertical dos andeis con caixas, o nivel da pista e o tamaño das caixas deben combinarse para determinar o parámetros xerais dos garfos de extensión (movemento do garfo de extensión, espazo entre caixas, ancho do garfo, ancho interno do garfo, altura do garfo, etc.), para satisfacer as necesidades dos recipientes nos andeis. O garfo de suxeición só pode transferir ou acceder aos produtos envasados en cartóns ou caixas de plástico de forma eficaz e non pode transferir materiais irregulares. Ademais, o volume e o peso da caixa de material transferido non deben ser demasiado grandes e o peso da carga non debe superar os 100 kg. A altura do garfo de suxeición é xeralmente deseñada segundo a altura do colector!
Acerca de HEGERLS Clip on Shuttle
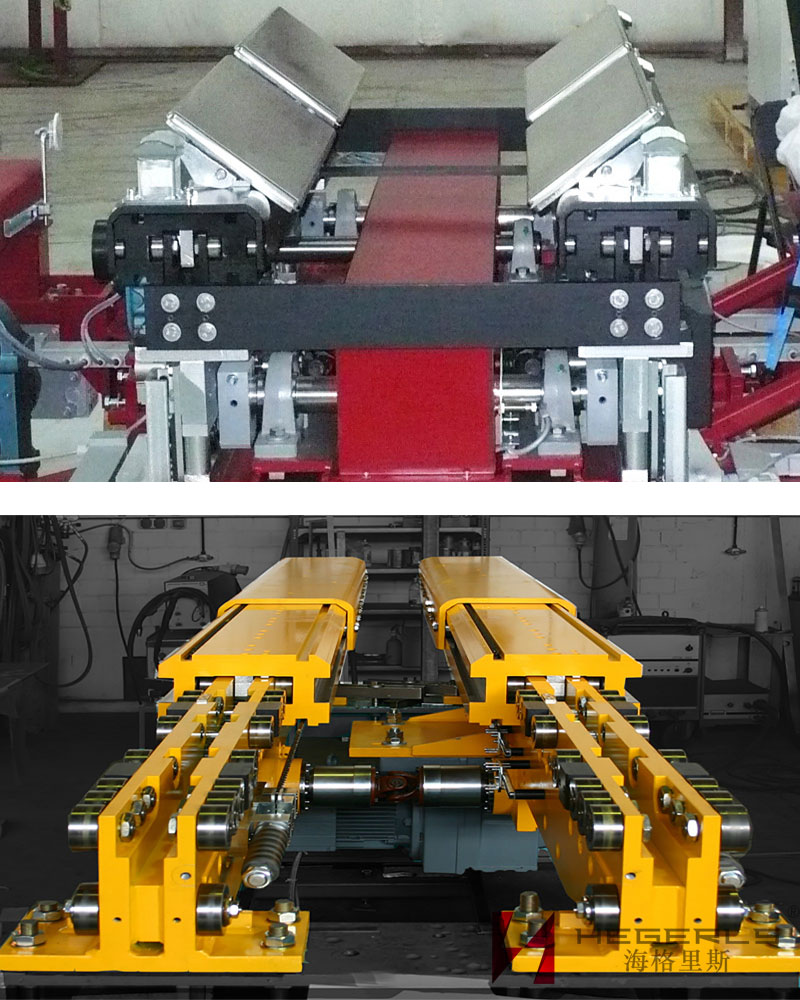
A estrutura do clip en lanzadeira HEGERLS consta de cadro de lanzadeira, chasis de lanzadeira, mecanismo de desprazamento, mecanismo de extensión de garfo secundario, colector, placa de rodamento e plataforma de rodamento. A estrutura é a seguinte:
Calquera armazón de lanzadeira adoita ser unha cavidade pechada composta polos soportes do corpo principal a ambos os dous lados, a carcasa e o soporte interior do cubo, e está disposta respectivamente nos dous extremos do chasis da lanzadeira; A carcasa está provista dunha cuberta superior que se pode abrir e pechar mediante unha bisagra da porta xiratoria; Unha rejilla do panel está disposta encima do soporte do cubo; O mecanismo de desprazamento comprende unha roda motriz, unha roda pasiva, un motor DC sen escobillas, un redutor e un eixe de conexión; Os dous lados do bastidor da lanzadeira nun extremo do chasis da lanzadeira están provistos de rodas motrices conectadas por eixes de conexión, e os dous lados do cadro da lanzadeira no outro extremo do chasis da lanzadeira están provistos de rodas pasivas conectadas por eixes de conexión; O motor sen escobillas de CC coopera co redutor para impulsar a roda motriz e impulsar a roda pasiva; O eixe de conexión está provisto dun codificador magnético, a través do cal se obteñen as posicións de inicio e parada da lanzadeira na vía recta; Un mecanismo de extensión de garfo secundario está disposto simétricamente no lado interior do bastidor do coche lanzadeira; O chasis da lanzadeira entre os mecanismos secundarios de extensión do garfo está provisto dunha plataforma de soporte para colocar a cesta de carga; A cavidade pechada do bastidor do coche lanzadeira está provista respectivamente dunha placa de rodamento, na que se dispoñen sucesivamente unha placa de condución, unha placa de control principal do mecanismo de desprazamento e unha placa de control principal do mecanismo de extensión do garfo; A placa de condución acciona o mecanismo de desprazamento para impulsar a lanzadeira para que corra pola vía recta. O taboleiro de control principal do mecanismo de viaxe controla os parámetros de execución e as posicións de parada de inicio da lanzadeira, e o taboleiro de control principal do mecanismo de extensión do garfo controla o mecanismo de extensión do garfo secundario para coller e colocar a cesta no andel; Entre o vagón lanzadeira e a vía recta colócase un dispositivo de recollida, que está conectado co fío electrificado disposto no interior da vía recta e que se usa para subministrar enerxía ao coche lanzadeira. A característica estrutural do clip do coche lanzadeira intelixente para o almacenamento tamén reside en que as ranuras están configuradas nas posicións nas que a roda motriz e a roda pasiva entran en contacto respectivamente co eixe de conexión e un anel de retención elástico está situado na ranura para formar o axial. posicionamento da roda motriz e da roda pasiva. As rodas de dobre guía sitúanse respectivamente no lado do chasis da lanzadeira, baixo a roda motriz e a roda pasiva, e entre a vía recta e o chasis da lanzadeira. As rodas de dobre guía forman os límites esquerdo e dereito cando a roda motriz e a roda pasiva circulan pola vía recta. O mecanismo de extensión de garfo secundario inclúe: a placa de empuxe de extensión de garfo de primeiro nivel, a placa de extensión de garfo de segundo nivel, o mecanismo de polea síncrona de segundo nivel, o mecanismo de tracción de extensión de garfo de segundo nivel, o motor de accionamento de extensión de garfo, outro redutor e o eixe de transmisión. ; O lado exterior do soporte do cubo do bastidor do coche lanzadeira está provisto dunha placa de empuxe de extensión de garfo de primeira etapa; Un canal en forma de U está disposto no medio da placa de empuxe do garfo da primeira etapa, e varias poleas en forma de U están dispostas a intervalos iguais no canal en forma de U; Unha placa de garfo secundaria está disposta fóra do canal en forma de U; A placa de garfo secundaria está conectada con varias poleas de ranura en forma de U a través de parafusos e porcas; Os extremos superiores da placa de extensión do garfo da segunda etapa están provistos respectivamente dun garfo de cambio, un motor reductor planetario de CC e un sensor fotoeléctrico desde o exterior para o interior; O sensor fotoeléctrico utilízase para obter o sinal de posición do garfo e envialo á tarxeta de control principal do mecanismo de extensión do garfo, que controla o motor reductor planetario de CC para que o garfo se mova horizontal ou verticalmente; Un mecanismo de polea síncrona secundaria está disposto respectivamente na placa de empuxe do garfo principal e directamente debaixo e por riba do tobogán en forma de U; O mecanismo de polea síncrona secundaria está conectado coa placa de presión da correa síncrona na placa de extensión do garfo secundario; O motor de accionamento da extensión de garfo e outro redutor impulsan o mecanismo de accionamento de extensión de garfo secundario para moverse e impulsan o mecanismo de accionamento de extensión de garfo secundario do outro lado para moverse a través do eixe de accionamento, de xeito que a placa de empuxe da extensión do garfo principal se move e impulsa o secundario. mecanismo de polea síncrona para moverse, impulsando así a placa de extensión do garfo secundario para moverse. O mecanismo de transmisión de extensión de garfo de dúas etapas comprende un codificador magnético, unha polea de correa síncrona I, unha correa síncrona I, un dispositivo de roda tensora e unha cremallera; Unha polea da correa de distribución 1 e unha correa de distribución 1 están dispostas debaixo da placa de empuxe do garfo da primeira etapa; Un lado da polea de correa síncrona I está conectado co eixe de transmisión e o outro lado está conectado co eixe de saída do outro redutor a través da chaveira. Os dispositivos de roda tensora sitúanse respectivamente a ambos os dous lados do outro redutor para a fixación auxiliar da polea da correa síncrona I e da correa síncrona I; Un bastidor está disposto entre a placa de empuxe do garfo da primeira etapa e a correa síncrona; O motor de tracción da extensión do garfo e outro redutor impulsan a polea de correa síncrona I e a correa síncrona I para xirar, e impulsan a polea de correa síncrona II e a correa síncrona II do outro lado para xirar a través do eixe de transmisión. Ao mesmo tempo, os bastidores de ambos os lados impulsan a correspondente placa de empuxe de extensión do garfo principal para conseguir a extensión do garfo principal. Cando o mecanismo de polea de correa síncrona secundaria móvese de forma sincronizada e move a placa de extensión do garfo secundario para moverse, a polea en forma de U rola no canal en forma de U, fai que a placa de extensión do garfo secundario realice a extensión do garfo secundario. O dispositivo da roda tensora inclúe: parafuso, soporte de axuste, porca dobre e roda tensora; Unha roda tensora está disposta debaixo da correa síncrona I e a ambos os dous lados do outro redutor, e fíxase no soporte do corpo principal mediante unha dobre porca; Un soporte de axuste está disposto debaixo da porca dobre a través do parafuso, e a posición do soporte de axuste axústase polo parafuso, de xeito que o soporte de axuste impulsa a porca dobre para moverse cara arriba e abaixo, para que o cinto sincrónico poida manter o estado de tensión baixo a acción da roda tensora.
Como beneficiará a empresa o autobús lanzadeira HEGERLS?
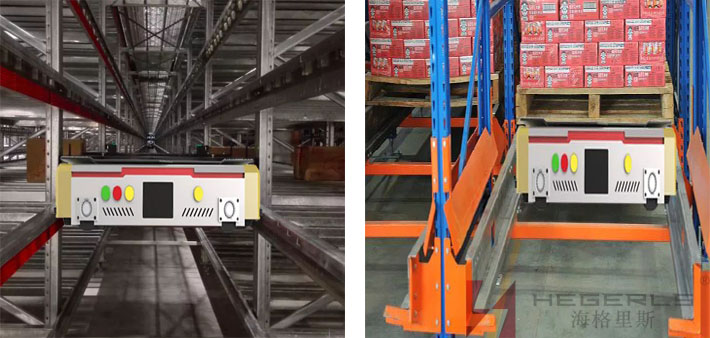
En primeiro lugar, o mecanismo de viaxe, o mecanismo de extensión do garfo e o cadro, a liña de contacto deslizante e o dispositivo de recollida de enerxía do coche lanzadeira intelixente HEGERLS con almacenamento de clip están dispostos de forma razoable, o que aproveita ao máximo o espazo do coche lanzadeira e pode adaptarse ao almacenamento e recuperación automática de mercadorías de diferentes especificacións e localizacións no almacén tridimensional, ampliando a cobertura da aplicación do coche lanzadeira e completando de forma rápida e eficaz unha serie de accións continuas do coche lanzadeira, como camiñar, extensión de garfo, recoller arriba e colocando mercadorías, realiza o almacenamento rápido e preciso de mercadorías, mellorando así moito a eficiencia operativa e o nivel de tecnoloxía de automatización do almacén automatizado e reducindo os custos de investimento das empresas. Ao mesmo tempo, é sinxelo e de estrutura lixeira, de alta fiabilidade e fácil de manter. Pode substituír o tradicional empilhador de estradas, dando conta da flexibilidade do sistema e conforme á tendencia de desenvolvemento da loxística de comercio electrónico e da automatización do almacén.
En segundo lugar, no mecanismo de desprazamento do coche lanzadeira intelixente HEGERLS, os eixes de conexión das rodas motrices e das rodas pasivas están provistos de ranuras e as pezas de conexión dos rodamentos están conectadas por un novo tipo de anel de retención elástico, dando conta do efecto de posicionamento axial da conexión. eixes; Usando o anel de retención elástico para conseguir o efecto de posicionamento axial, pódese aumentar a eficiencia da produción e aforrar o custo.
Terceiro: o coche lanzadeira intelixente de Higelis HEGERLS para almacenar almacenamento dáse conta de que a roda motriz e a roda pasiva sempre se moven na vía recta sen desviarse da vía a través da estrutura da roda guía dobre. Esta estrutura de posicionamento é máis estable e fiable.
En cuarto lugar, a estrutura secundaria de extensión do garfo adoptada polo coche lanzadeira intelixente HEGERLS pode aumentar a distancia de extensión do garfo e obter máis cestas en diferentes posicións; Ao mesmo tempo, o principio do mecanismo de extensión do garfo secundario é sinxelo e o custo de deseño e fabricación é baixo; A parte de transmisión adopta o modo de motor único + redutor + eixe de transmisión para facer que o mecanismo de extensión do garfo secundario alcance o propósito de expansión e contracción sincrónicas, o que aforra máis custos, reduce de forma efectiva o espazo de deseño necesario e reduce o peso do coche lanzadeira. .
En quinto lugar, o coche lanzadeira intelixente Higelis HEGERLS adopta un novo tipo de dispositivo de roda tensora, que pode manter rapidamente o cinto síncrono tenso e realizar o traballo normal do coche lanzadeira. Ademais, este dispositivo de roda tensora é sinxelo de facer, cómodo de instalar e pódese axustar rapidamente, o que aforra custos, aforra espazo e mellora a eficiencia do traballo.
Hora de publicación: 19-12-2022